Rc parachute springen’ de besturing’
| Naam | Span (mm) | Lengte (mm) | Power | Gewicht (kg) | Eigenaar |
|---|---|---|---|---|---|
| Para | 158cm | 1,4 kg | Geert |
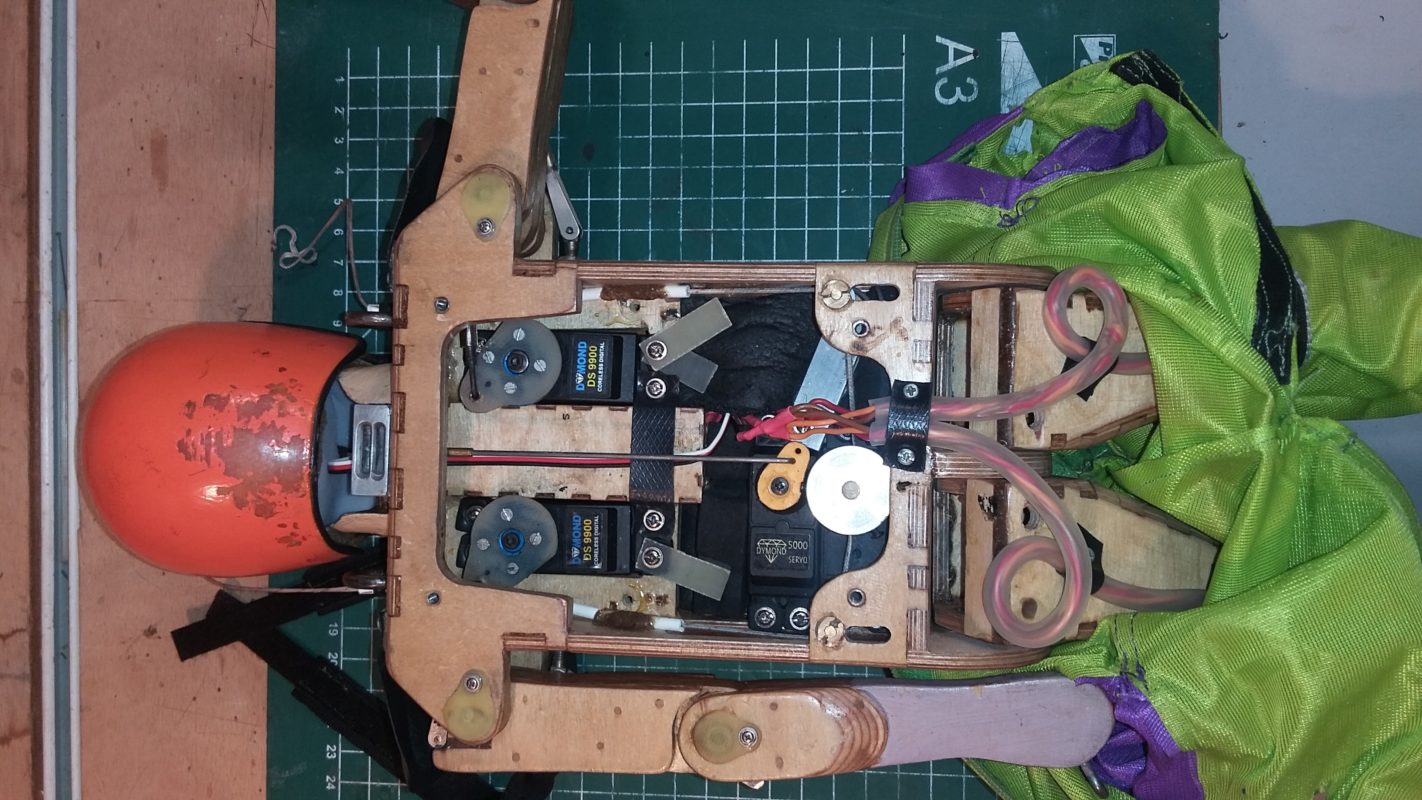
Bij het radiografisch parachutespringen is het belangrijk dat de pop goed bestuurbaar is. Daarvoor zijn meestal twee servo’s aanwezig die de armen van de pop bewegen en daarmee ook de stuurlijnen van de parachute bedienen. Het is belangrijk om de servo’s zo af te stellen dat in de uiterste standen van de armen een mechanische aanslag de klappen op de arm opvangt. Als je dat niet goed doet dan sneuvelen de tandwielen van de servo’s zodra de pop een harde landing op de armen maakt. Tevens is er een servo nodig om na de verplichte vrije val de rugzak te openen en de pilot-chute de hoofdparachute uit de rugzak te laten trekken.
Er zijn ook piloten die nog een extra servo of zeilwinch gebruiken om de voorkant van de parachute naar beneden te trekken en daarmee de vorm van de parachute te veranderen. Het gevolg hiervan is dat de voorwaardse- en de daalsnelheid van de parachutist toeneemt. Ikzelf heb een gps module in de pop zitten waarmee ik o.a. dat kan meten. Probleem is echter dat dit een langzaam proces is en dus niet werkt als je bijna geland bent.
Op de foto zie je hoe de binnenkant er uit kan zien als je het bovenstaande allemaal inbouwd. De draadjes aan de onderkant naar de benen zijn voor de maispiepers. Een handig hulpmiddel als de landing en keertje niet op de cirkel is. Mocht je meer info willen hebben dan kun je altijd contact opnemen. Zie ook www.rc-parachute.nl
Geef een reactie